
By open cv
Implemented multiple functions such as color selection, gray scale, and trackbar with the OpenCV library in a camera module for a vehicle to establish basic lane detection capability
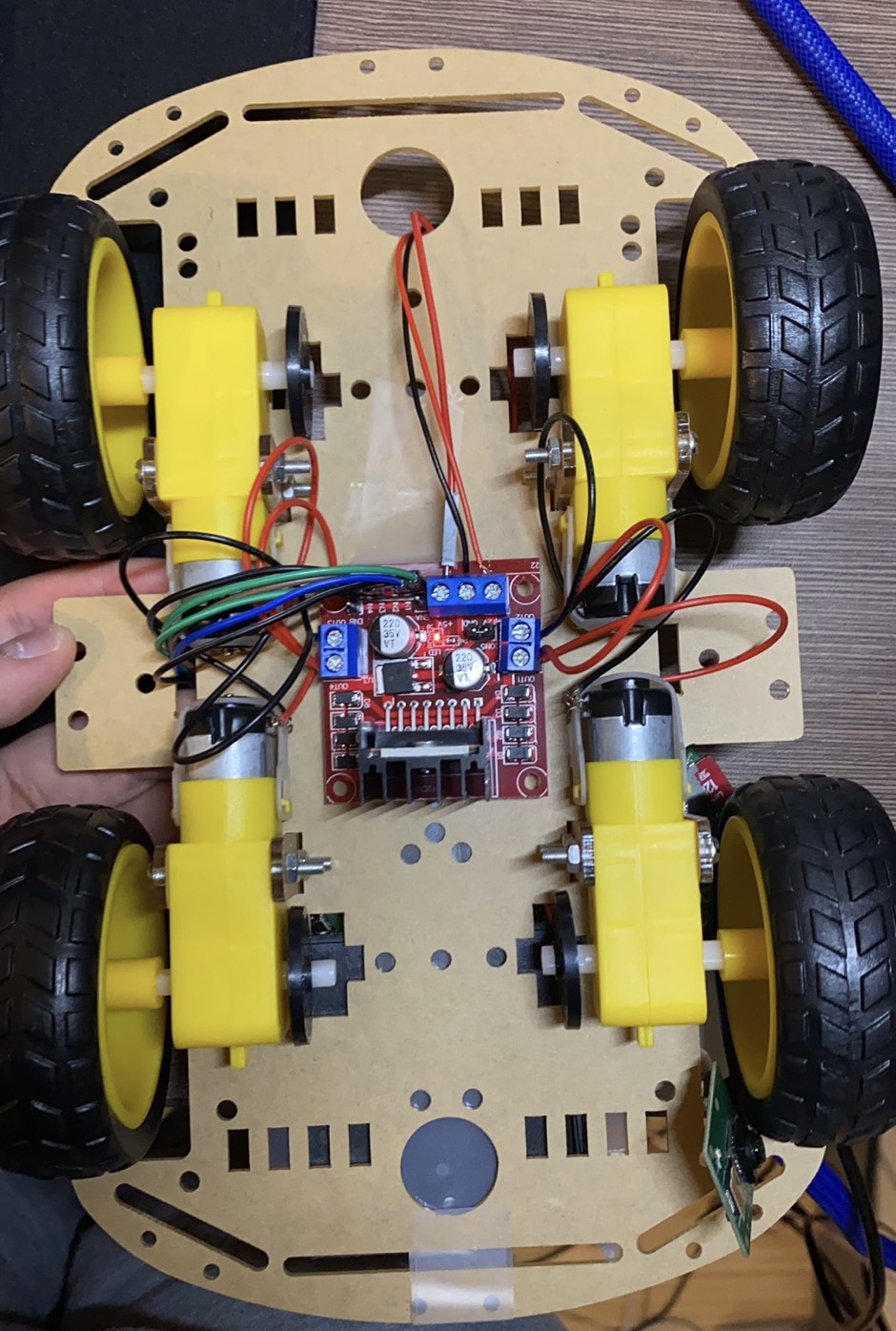
Leveraged the Raspberry Pi to establish the connection between the software, motor module, and camera module, allowing for seamless communication and coordination among the different components of the system